

|
구글 무인자동차의 첫 사고와 숙제
< 구글 무인자동차 사고 직후 모습 >
구글은 지난 수년간 무인자동차를 개발하고, 미국에서 주행 테스트를 이어가고 있습니다. 일주일 평균 16000km를 주행하며, 작년 중순까지 구글의 무인자동차들이 주행한 거리는 270만 km를 넘습니다. 과실 사고 0건을 자랑하던 구글의 무인자동차는 지난 2월 14일 무인자동차 과실로 첫 사고가 났습니다. 구글은 캘리포니아 규제 기관에 제출한 문서를 통해 캘리포니아에서 주행 중이던 렉서스 RX450h 자율운전차량이 모래주머니들을 우회하다가 충돌사고가 일어났다고 밝혔습니다. 시건 보고서를 좀 더 자세히 보면 모래주머니를 피해 옆 차선으로 진입하려던 무인자동차는 버스가 약간 뒤에서 접근 중인 걸 보고 버스가 양보해주겠지라는 생각으로 차선 변경을 시도하였습니다. 그러나 버스는 무인자 |
동차에게 양보해주지 않고 그대로 직진하였고, 3초 뒤 무인자동차는 버스의 측면을 들이 받았습니다. 버스가 양보해주지 않을 가능성을 고려하여 버스가 속도를 줄이지 않는다면 바로 멈췄어야 했는데 소프트웨어의 허점으로 인해 그대로 들이 받은 것으로 보입니다. 구글은 사건 보고서를 통해 이번 사고의 대책을 소프트웨어에 반영한다고 밝혔습니다.
라이카 무인항공기의 항공촬영 시연
지난 4월 14일 양재천 벚꽃길에서 라이카의 드론(Aibot X6) 시연 행사가 있었습니다. 본 행사는 시연측인 라이카를 비롯하여 제이비티와 아이오티솔루션의 임직원 분들이 함께하였으며, 사용된 |
장비는 헥사콥터 형태의 드론으로 항공사진측량을 위한 무인항공기(UAV) 모델이었습니다.
< 드론 비행 사진 >
담당자의 설명에 의하면 3m/s의 기본 비행속도와 5m/s의 최고 비행속도 성능을 가지며 안전 비행거리는 편도 500m라고 합니다. 비행 전 캘리브레이션(드론과 무선조정기 기준을 설정하는 작업)이 시행되었는데, 주변에 자기장이 강할 경우 지자기센서의 오차가 생길 수 있어 재설정한 것이라고 합니다. 캘리브레이션과 비행좌표입력을 한 후 총 2회의 시연이 실시되었으며 각 비행시간은 7분 정도였습니다. 바람이 상당히 불었음에도 불구하고 비행과 촬영을 안정적으로 마치고 행사가 종료되었습니다. |


|
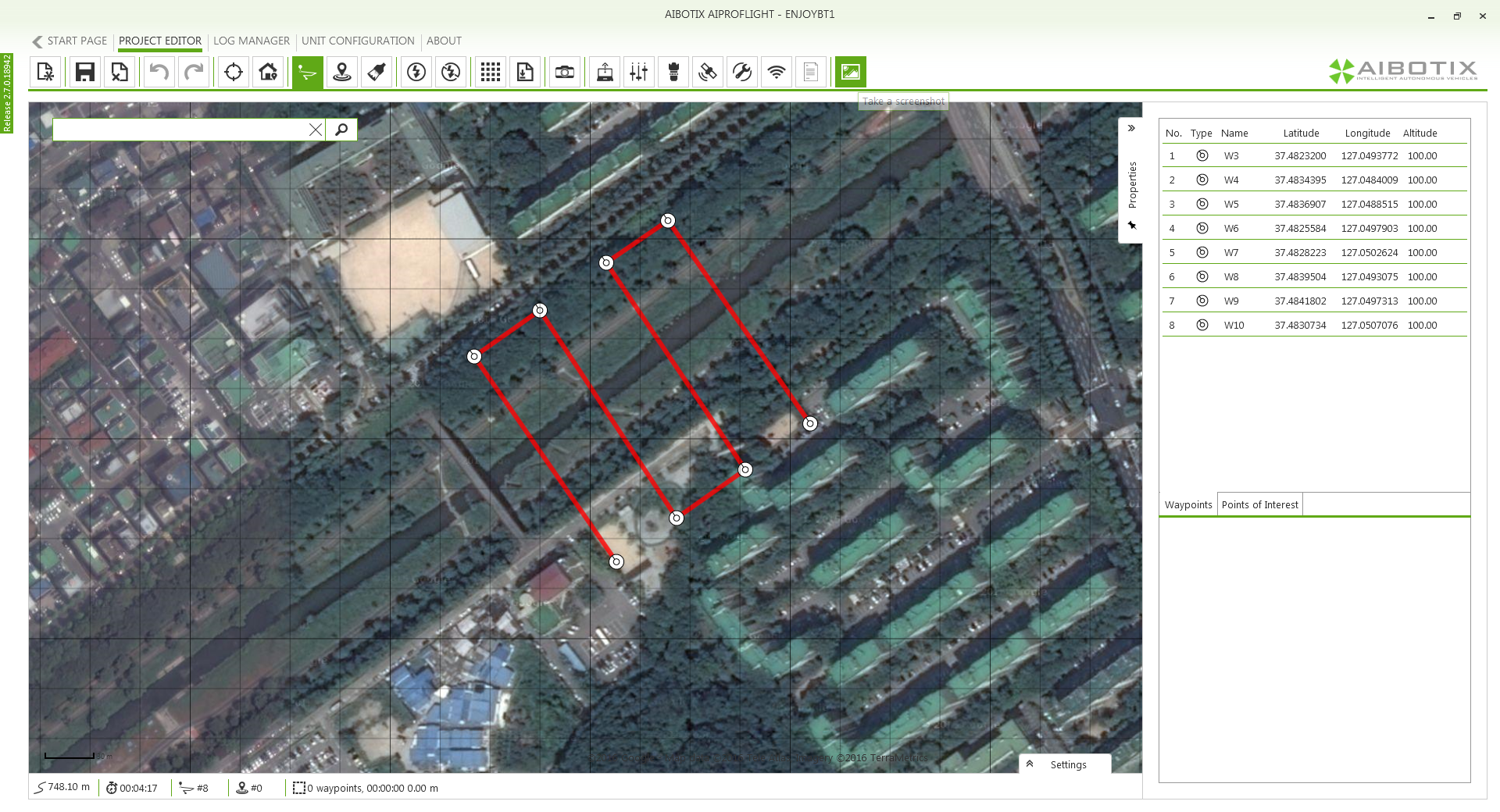
< 무인비행경로 입력 화면 >
무인항공기 드론은 재난발생시 위험지역에 대한 빠르고 정확한 관측을 목적으로 하기 때문에 향후 본사 재난관리 플랫폼의 고도화에 있어 좋은 협력관계가 될 수 있을 것으로 기대됩니다.
[강추기사모음] 이 기사 보셨나요?
이 코너에서는 함께 공유하면 좋을만한 기사들을 선정해 보았습니다. 기사 제목을 선택하시면 해당 페이지로 이동합니다. 잘 알려지지 않은 기사중에서 다른 직원들과 나누고 싶은 정보가 있다면 뉴스레터 편집실로 알려 주세요.
≫ “VR은 언제쯤 대중적으로 소비될 수 있을까?” VR 스타트업 대표 5인의 전망 (출처:플래텀/2016. |
3.25.)
≫ "VR은 무조건 뜬다"는 세 가지 이유 (출처:ZDNet Korea/2016.3.28)
≫ 이것이 대한민국 최초 컴퓨터입니다 (출처:연합뉴스/2016.3.29)
≫ MS, 비주얼스튜디오용 자마린 무료화 (출처:ZDNet Korea/2016.4.1)
≫ '자마린' 품은 MS의 멀티 플랫폼 전략, 이번엔 성공할까 (출처:CIO Korea/2016.4.1)
≫ 칼럼 | 맨땅에 헤딩, 그리고 머리가 깨지던 시절... (출처:CIO Korea/2016.4.1)
≫ 재사용 UI 컴포넌트 설계 (출처:SK플래닛 기술블로그/2016.4.4)
≫ <웹진 170호 : 공학 트렌드> 소프트웨어 설계 - 아키텍처 편 (출처:SW공학센터/2016.4.4)
≫ 지금 코볼을 배워야 하는 3가지 이유 (출처:CIO Korea/2016.4.5.) |
≫ 아이나비 X카 '증강현실 내비' (출처:ZDNet Korea/2016.4.11)
≫ 위치 정확도 높인 'GPS2.0 시대' 열린다 (출처:ZDNet Korea/2016.4.19)
≫ 페이스북, 개발자 누구나 머신러닝을 이용할 수 있는 ‘봇 엔진’ 공개 (출처:techNeedle/2016.4.17) |